前言
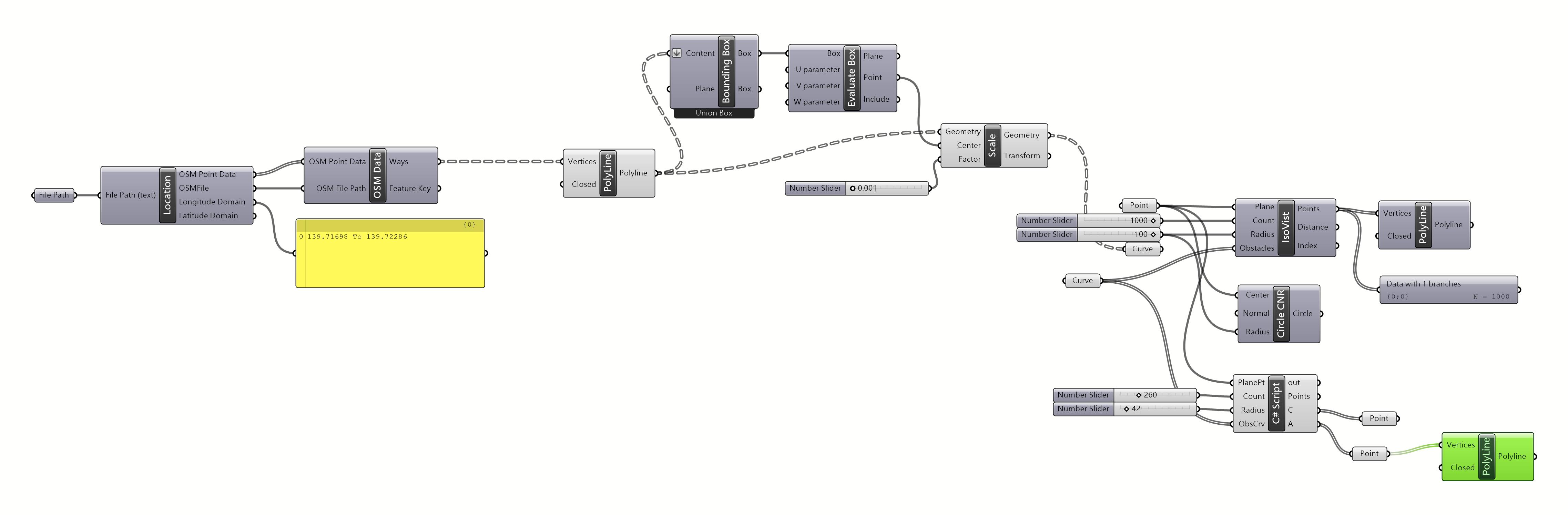
可能大家有接觸過用Grasshopper作環境分析,那可能會知道Isovist這個方便的component。從下面看到這Component可以幫助決定視野範圍。
原理很簡單就是2D的圓看根最近的建築物交界到哪裡。
建築物的線我是透過Elk放入OpenStreetMap達成的。可以參考一下
OSM_Through_Elk
或是我的方式:
Csharp code
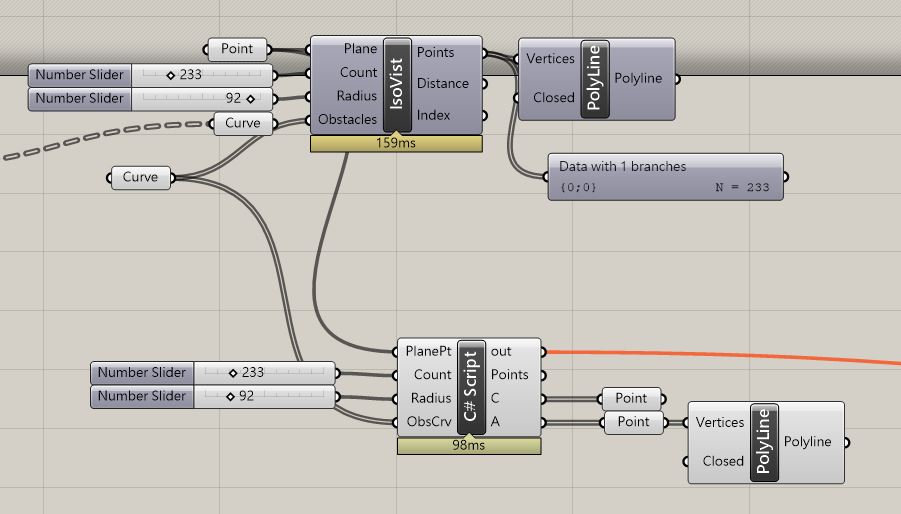
我意外看到這篇討論,想說自己也來實作一下用C#做一個IsoVist之後討論一下怎麼加速,跟後續可能可以玩的方向
IsoVist_Optimization
而我自己的Code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
| private void RunScript(Point3d PlanePt, int Count, int Radius, List<Polyline> ObsCrv, ref object Points, ref object C, ref object A)
{
List<Point3d> pts = new List<Point3d>();
Circle cir = new Circle(PlanePt, Radius);
Curve CirCrv = cir.ToNurbsCurve();
Point3d[] CirPts;
double[] CirPts_double = CirCrv.DivideByCount(Count, true, out CirPts);
List<Point3d> result_net = new List<Point3d>();
for(int k = 0; k < Count; k++){
Line ln = new Line(PlanePt, CirPts[k]);
List<Point3d> ln_Pts = new List<Point3d>();
for(int i = 0; i < ObsCrv.Count; i++){
Line[] segs = ObsCrv[i].GetSegments();
for(int j = 0; j < segs.Length; j++){
double a;
double b;
Intersection.LineLine(ln, segs[j], out a, out b, 0.00000001, true);
if(Intersection.LineLine(ln, segs[j], out a, out b, 0.00000001, true)){
ln_Pts.Add(segs[j].PointAt(b));
}
}
}
Point3d closest_pt;
if(ln_Pts.Count > 0)
closest_pt = Point3dList.ClosestPointInList(ln_Pts, PlanePt);
else{
closest_pt = CirPts[k];
}
result_net.Add(closest_pt);
}
A = result_net;
C = CirPts;
}
|
演算法的想法
- 平分個一個以人為圓點的圓,分成Count分
- 用圓點跟在圓周上的點連線
ln 和 每個建築物的牆壁segs[j]找相交點
- 有兩個以上交點的話找離圓點最近的,沒有跟建築物相交的話 回傳圓周上的點
關於LineLine的相交
在部落格我分別寫了兩篇(2D/3D)的線與線相交的判定。
三維的線與線相交其實是看兩條線的最短距離<容許值
ParametricCamp有比較完整的介紹
Computational Design Live Stream #14
論壇po文想達成的是盡量加速這個運算,之後我也能往那方向想,目前是跟Component效能差不多
- 目前的想到的想法是可以先對那些牆壁的line以角度sort過一遍,應該可以加速一個
for-loop
Demo
可能的發展
加速
加速的理由有很多,
- 為了一次分析多一點人
- 讓計算時間變短-Real time result
導入Magnetic field
在Grasshopper裡面有Fields對人流動線的分析應該會很有幫助
有興趣可以看看這個
https://www.youtube.com/watch?v=zSI1StT07LM
扇形視野
最後可能可以分析的是更接近真實的視野,不是360度。轉成170之類的。